Cesky: |
Simple DC voltmeter
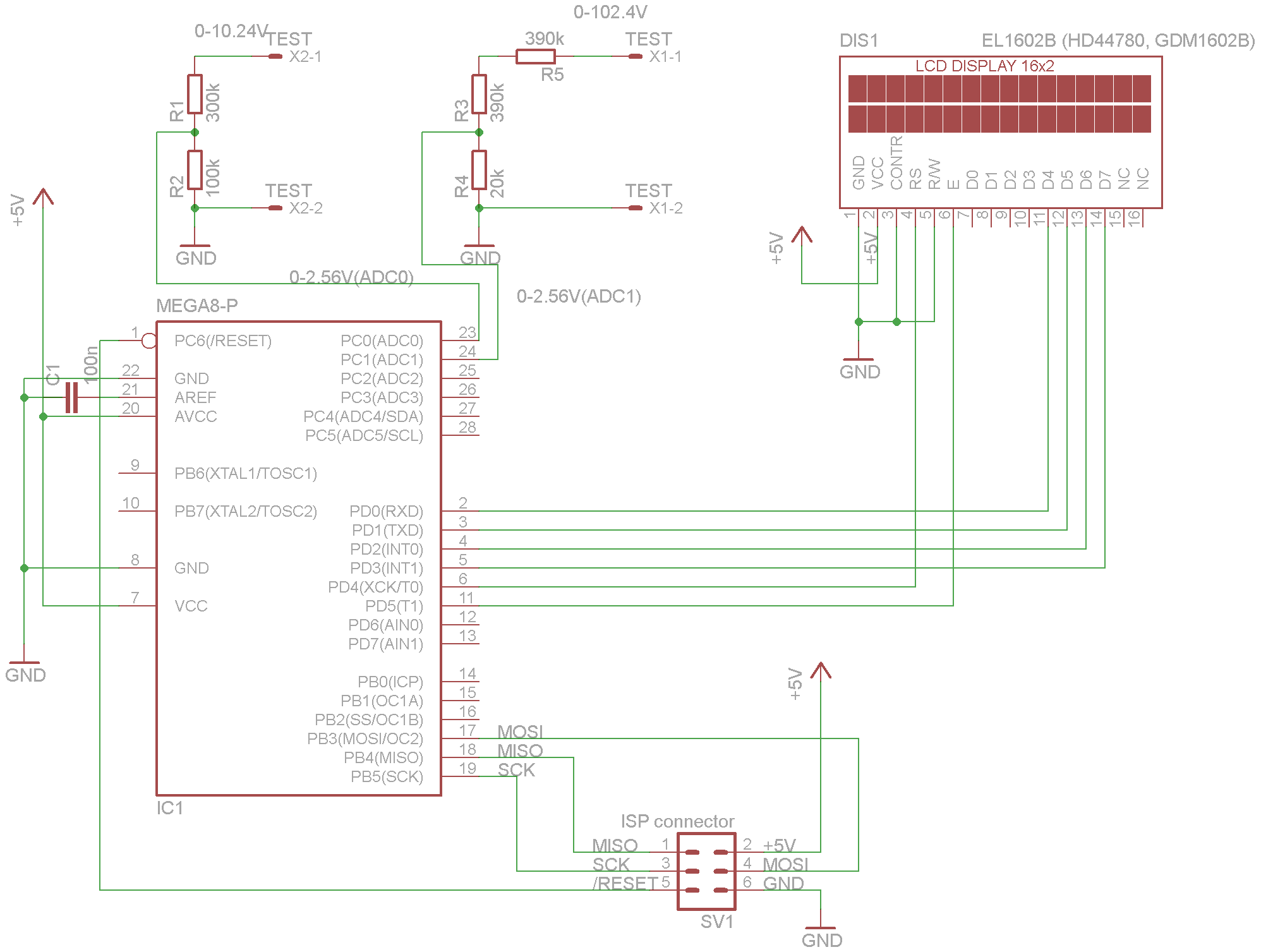
Using an A/D converter, 2 inputs are captured (10V and 100V ranges) and displayed as 2 values on the EL1602B LCD display. There is no PCB, just a schematic, it's just left in the form of a sparrow's nest. :-)
#define B0 0x1
#define B1 0x2
#define B2 0x4
#define B3 0x8
#define B4 0x10
#define B5 0x20
#define B6 0x40
#define B7 0x80
typedef signed char s8;
typedef unsigned char u8;
typedef unsigned short u16;
typedef unsigned long int u32;
typedef char BOOL;
#define TRUE 1
#define FALSE 0
/*=============================================================================
LCD display EL1602B (controller Hitachi HD44780, KS0066)
=============================================================================*/
/*
Running at internal RC 8 MHz
Fuses: high=0xd9, low=0xe4 to 8 MHz (use 0xef on external crystal)
(Normal: high=0xc1, low=0x1f, calibration byte 0xc3)
default: high=0xd9, low=0xe1
*/
/*
http://joshuagalloway.com/lcd.html
http://robo.fe.uni-lj.si/~kamnikr/sola/urac/vaja3_display/How%20to%20control%20HD44780%20display.pdf
http://www.bipom.com/documents/appnotes/LCD%20Interfacing%20using%20HD44780%20Hitachi%20chipset%20compatible%20LCD.pdf
EL1602B-FL-YTS (Y=yellow LED) - japan character set
EL1602B-FL-YBS
EL1602A-FL-YBW
ATM1602B-NL-BBW (B=blue LED)
GDM1602B-FL-YBW
2 rows with 16 rows
Pins and connection:
1 VSS (GND) .... GND (board 1)
2 VDD (+5 V) .... +5V (board 2 with +5V wire)
3 V0 (contrast adjustment)
4 RS (H/L register select signal) ... PC0 (CPU 23, board 3)
5 R/W (H/L Read/Write signal) ... PC1 (CPU 24, board 6)
6 E (H/L Enable signal) ... PC2 (CPU 25, board 4)
7 DB0 (H/L Data bus line) .... PB0 (CPU 12, board 12)
8 DB1 (H/L Data bus line) .... PB1 (CPU 13, board 13)
9 DB2 (H/L Data bus line) .... PB2 (CPU 14, board 14 - last)
10 DB3 (H/L Data bus line) .... PD3 (CPU 1, board 7)
11 DB4 (H/L Data bus line) .... PD4 (CPU 2, board 8)
12 DB5 (H/L Data bus line) .... PD5 (CPU 9, board 9)
13 DB6 (H/L Data bus line) .... PD6 (CPU 10, board 10)
14 DB7 (H/L Data bus line) .... PD7 (CPU 11, board 11)
15 K LED- (0V for back light)
16 A LED+ (+4.2V for back light)
Commands:
00000001 Clear Display and Home the Cursor
0000001* Return Cursor and LCD to Home Position
000001IS Set Cursor Move Direction (I: increment/decrement; S: shift display)
00001DCB Enable Display/Cursor (D: display on, C: cursor on, B: blink on)
0001SR** Move Cursor/Shift Display (S: diplay shift, R: direction right)
001DNF** Set Interface Length (D: 8 bit interface, N: 2 rows, F: big font)
01AAAAAA Move Cursor into CGRAM (A: address)
1AAAAAAA Move Cursor to Display (A: address)
*/
#include <avr/io.h>
#include <util/delay.h>
/* set ENABLE state ON */
#define EN_ON PORTD |= B5
/* set ENABLE state OFF */
#define EN_OFF PORTD &= ~B5
/* set DATA mode */
#define DATA_MODE PORTD |= B4
/* set COMMAND mode */
#define CMD_MODE PORTD &= ~B4
/* output data byte */
#define DataOut(d) { PORTD = (PORTD & 0xf0) | ((d) & 0xf); }
/* write data byte */
void WriteData(unsigned char data)
{
DATA_MODE;
DataOut(data>>4);
EN_ON;
_delay_us(5);
EN_OFF;
_delay_us(5);
DataOut(data);
EN_ON;
_delay_us(5);
EN_OFF;
_delay_us(100);
}
/* write command byte, some commands need additional waiting */
void WriteCmd(unsigned char cmd)
{
CMD_MODE;
DataOut(cmd>>4);
EN_ON;
_delay_us(5);
EN_OFF;
_delay_us(5);
DataOut(cmd);
EN_ON;
_delay_us(5);
EN_OFF;
_delay_us(100);
}
/* clear display */
void LCD_Clear() { WriteCmd(1); _delay_ms(5); }
/* return to home position */
void LCD_Home() { WriteCmd(2); _delay_ms(5); }
/* set entry mode: right=shift cursor right, shift=shift entire display */
inline void LCD_Entry(BOOL right, BOOL shift)
{ WriteCmd(4 + (right ? 2 : 0) + (shift ? 1 : 0)); }
/* set display on: disp=display on, cur=cursor on, blink=blinking on */
inline void LCD_DispOn(BOOL disp, BOOL cur, BOOL blink)
{ WriteCmd(8 + (disp ? 4 : 0) + (cur ? 2 : 0) + (blink ? 1 : 0)); }
/* set cursor shift: shift=cursor shift, right=shift to right */
inline void LCD_Shift(BOOL shift, BOOL right)
{ WriteCmd(0x10 + (shift ? 8 : 0) + (right ? 4 : 0)); }
/* set CGRAM (character generator) address */
inline void LCD_CGRAM(u8 addr) { WriteCmd(0x40 + addr); }
/* set DDRAM (display data) address */
inline void LCD_DDRAM(u8 addr) { WriteCmd(0x80 + addr); }
void LCD_Init(void)
{
/* set port to output mode */
DDRD |= B5+B4+B3+B2+B1+B0;
EN_OFF;
/* wait for more than 20 ms for LCD power up */
_delay_ms(100);
/* byte synchronisation to new interface */
CMD_MODE;
/* byte synchronisation using 8-bit interface */
DataOut(0x3);
EN_ON;
_delay_us(200);
EN_OFF;
_delay_ms(5);
DataOut(0x3);
EN_ON;
_delay_us(200);
EN_OFF;
_delay_ms(1);
DataOut(0x3);
EN_ON;
_delay_us(200);
EN_OFF;
_delay_ms(1);
/* switch to 4-bit interface */
DataOut(0x2);
EN_ON;
_delay_us(100);
EN_OFF;
_delay_ms(5);
/* set data interface to 8/4 bit, 2 rows, font 5x7 */
WriteCmd(0x28);
_delay_ms(5);
/* display off, cursor off, blinking off */
LCD_DispOn(FALSE, FALSE, FALSE);
/* clear display, home cursor */
LCD_Clear();
/* auto move cursor right */
LCD_Entry(TRUE, FALSE);
/* display on, cursor on, blinking on */
LCD_DispOn(TRUE, TRUE, TRUE);
LCD_CGRAM(0);
WriteData(0x12);
WriteData(0);
WriteData(0xf);
WriteData(0x1b);
WriteData(0x1b);
WriteData(0x0f);
WriteData(3);
WriteData(0xe);
}
u8 dispbuf[10];
// display number with 1 decimal digit
void dispnum1(u16 num)
{
s8 i, j;
i = 0;
for (;;)
{
dispbuf[i] = (u8)((num % 10) + '0');
num /= 10;
if ((num == 0) && (i > 0)) break;
i++;
}
j = 3 - i;
for (; j > 0; j--) WriteData(' ');
for (; i > 0; i--) WriteData(dispbuf[i]);
WriteData('.');
WriteData(dispbuf[i]);
}
// display number with 2 decimal digits
void dispnum2(u16 num)
{
s8 i, j;
i = 0;
for (;;)
{
dispbuf[i] = (u8)((num % 10) + '0');
num /= 10;
if ((num == 0) && (i > 1)) break;
i++;
}
j = 3 - i;
for (; j > 0; j--) WriteData(' ');
for (; i > 1; i--) WriteData(dispbuf[i]);
WriteData('.');
WriteData(dispbuf[i]);
WriteData(dispbuf[i-1]);
}
void dispV()
{
WriteData('V');
}
#define CNT 1024
#define CNT_BITS 10
int main(void)
{
u32 sum1, sum2;
u16 n, adc;
LCD_Init();
// ADC: http://www.robotplatform.com/knowledge/ADC/adc_tutorial_4.html
// enable ADC, set prescaler to 64 (on 8 MHz we need to be lower than 200kHz)
ADCSRA = (1<<ADEN) | (1<<ADPS2) | (1<<ADPS1) | (1<<ADPS0);
n = CNT;
sum1 = 0;
sum2 = 0;
while (1)
{
// --- measure U1
// select reference voltage to internal 2.56V, right justify, select ADC input to ADC0
ADMUX = 0 + (1<<REFS0) + (1<<REFS1);
// start conversion
ADCSRA |= (1<<ADSC);
// wait until conversion completes
while (ADCSRA & (1<<ADSC));
// read ADC result
adc = ADCW;
// sum value
sum1 += adc;
// --- measure U2
// select reference voltage to internal 2.56V, right justify, select ADC input to ADC1
ADMUX = 1 + (1<<REFS0) + (1<<REFS1);
// start conversion
ADCSRA |= (1<<ADSC);
// wait until conversion completes
while (ADCSRA & (1<<ADSC));
// read ADC result
adc = ADCW;
// sum value
sum2 += adc;
// --- display result
n--;
if (n == 0)
{
// display U1
LCD_DDRAM(0);
dispnum2((u16)(sum1 >> CNT_BITS));
dispV();
LCD_DDRAM(0x40+3);
WriteData('U');
WriteData('1');
// display U2
LCD_DDRAM(8);
dispnum1((u16)(sum2 >> CNT_BITS));
dispV();
LCD_DDRAM(0x40+8+3);
WriteData('U');
WriteData('2');
// set cursor off
LCD_DDRAM(0x50);
// new measure
n = CNT;
sum1 = 0;
sum2 = 0;
}
}
}
Download source code and diagram: AVmeter
Miroslav Nemecek